

Надежная работа 1-wire сетей (часть 2)
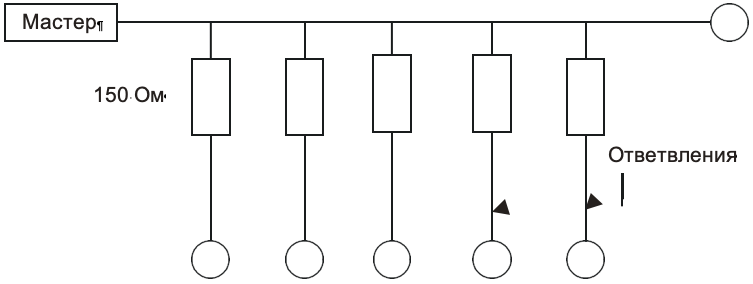
Возможно, наиболее успешной реализацией данной идеи является использование резисторов сопротивлением 150 Ом в каждой точке, где шлейф соединяется с основной линией. Это приводит к уменьшению рассогласования в точке соединения примерно на 20% и ослабляет отражения в шлейфе примерно на 40%. Однако дополнительное сопротивление снижает помехоустойчивость на величину около 80%, поэтому необходимо предусматривать меры предосторожности. (Испытания также показали устойчивую работу сети при использовании резисторов сопротивлением 100 Ом, а это уже не так сильно сказывается на помехоустойчивости).
Примечание:
Устройство DS2480B, применяемое в качестве интерфейса со стороны мастера (используемое в интерфейсе PC DS9097U и некоторых других интерфейсах шины 1-Wire), имеет динамическую подтяжку, на которую отрицательно влияет это дополнительное сопротивление. Поэтому с данным типом интерфейса этот метод работать не будет. Успешное применение метода распределенных резисторов всегда осуществляется при помощи заказного драйвера мастера с повышенным входным порогом данных.
СУЩЕСТВУЮЩИЕ И РАЗРАБАТЫВАЕМЫЕ ПРИБОРЫ ИНТЕРФЕЙСА МАСТЕРА
За последние годы для персональных компьютеров был создан ряд интерфейсов мастера. При этом использовались различные методы согласования сетей 1-Wire с микроконтроллерами, но в самих разработках было мало согласованности. Мастера разрабатывались для различных целей, и их работа не всегда была надежной, когда условия отличались от задуманных. Аппаратная реализация интерфейса мастера часто является критичным фактором в определении ограничений схемного решения сети 1- Wire. Простые с точки зрения аппаратного обеспечения интерфейсы, предназначенные для сетей с короткими проводниками и близко расположенными считывающими устройствами iButton, могут сослужить плохую службу при подсоединении к более крупным сетям и сложным монтажным схемам. Некоторые сложные драйверы, рассчитанные на очень длинные линии, плохо работают, когда они используются в сетях короткой и средней длины.
Сегодня наибольшее распространение имеют следующие аппаратные реализации интерфейсов:
a) DS9097 — адаптер последовательного порта PC (не рекомендуется для новых разработок);
b) DS9097U — адаптер последовательного порта PC (на базе DS2480B);
c) PC DS1410E — адаптер параллельного порта;
d) DS9097U-E25 — адаптер последовательного порта PC с программируемым EPROM;
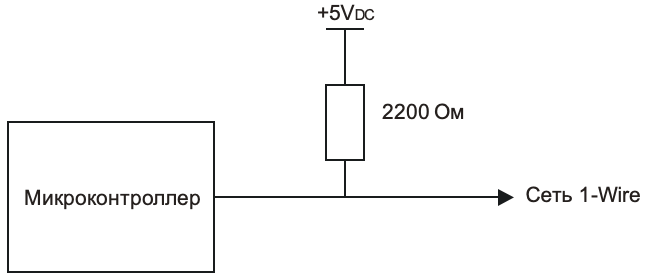
e) Вывод порта микроконтроллера с подтягивающим резистором 2 кОм;
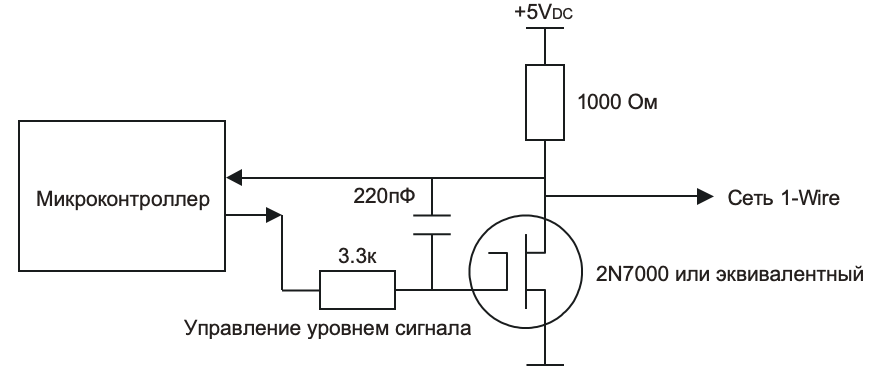
f) Микроконтроллер с полевым транзистором, ограничивающим скорость нарастания выходного напряжения, и резистором 1 кОм;
g) Микроконтроллер c усовершенствованным интерфейсом шины;
h) Микроконтроллер с интерфейсом шины DS2480B.
Каждый из этих обычно используемых приборов интерфейса мастера имеет свои отличия. Каждый имеет различные ресурсы, доступные на том порте компьютера, к которому подсоединяется прибор, и каждый был разработан для разного применения. На самом деле не все из этих приборов хорошо подходят для более сложных сетей, которые уже начали реализовывать потребители. Хотя сейчас разрабатывается и тестируется новое, более совершенное аппаратное обеспечение мастера, пользователям необходимо знать о существующих и будущих ограничениях области применения сетей 1-Wire.
Интегральная схема мастера, шинный преобразователь последовательный-в-1-Wire DS2480B, используется в серии адаптеров DS9097U и в некоторых других готовых устройствах для шины 1-Wire. Микросхема DS2480B была разработана для эффективной работы в протяженной линии за счет некоторого снижения надежности ее работы в коротких и средних сетях. Это вызвало некоторую путаницу среди пользователей. Чтобы в значительной степени улучшить работу коротких и средних сетей и повысить их надежность, можно установить между DS2480B и сетью простую и недорогую RC- цепочку (см. приложение D).
Микроконтроллер c усовершенствованным интерфейсом шины, упомянутый в приведенном выше списке, представляет собой новую схему, которая разрабатывается для объединения лучших драйверов и получения наиболее надежного и универсального интерфейса мастера. Схема этого интерфейса приведена в приложении С
РЕКОМЕНДАЦИИ ПО ИСПОЛЬЗОВАНИЮ ДОСТУПНЫХ НА ДАННЫЙ МОМЕНТ ИНТЕРФЕЙСОВ
В результате всесторонних исследований шины 1-Wire были получены данные по рабочим ограничениям, которые нужно учитывать при использовании перечисленных выше имеющихся стандартных интерфейсных устройств. Предлагаемые далее ограничения следует соблюдать при разработке сетей 1-Wire с перечисленными ниже мастерами.
Простые интерфейсы вывода порта микроконтроллера не обеспечивают управляющий ток, необходимый для поддержания работы больших или даже средних сетей. Значение сопротивления подтягивающего резистора часто ограничивается до величины около 2200 Ом способностью выхода порта понижать напряжение (pulldown), что исключает «тяжелые» сети (сети с высокими значениями веса). Интерфейсы только-вывода-порта следует использовать только в сетях с радиусом и весом не более 3 м (см. приложение А).
Интерфейсы микроконтроллера, которые включают драйвер на полевом транзисторе с управлением скоростью нарастания напряжения и подтягивающий резистор сопротивлением 1000 Ом, могут поддерживать сеть средних размеров. Использование этого интерфейса обеспечивает надежную работу сети при радиусе до 200 м и весе до 200 м (cм. Приложение В).
Интерфейс параллельного порта DS1410E был разработан для использования с очень короткими (локальными) контактными устройствами iButton. Он не рекомендуется для поддержки сетей 1-Wire средней и большой протяженности. Для этого мастера радиус сети следует ограничить небольшой величиной — порядка трех метров. Вес должен составлять менее 40 м.
Интерфейс последовательного порта DS9097 был разработан для использования с очень короткими (локальными) контактными устройствами iButton. Он не рекомендуется для поддержки сетей 1-Wire средней и большой протяженности. Радиус сети следует ограничить небольшой величиной — порядка трех метров. Вес должен составлять менее 40 м.
Мастера на основе DS2480B (DS9097U, TINI). При использовании этого мастера в сетях свыше 1 м, необходимо всегда включать в схему RC-фильтр (см. приложение D). При использовании такого фильтра этот мастер может надежно поддерживать сеть с радиусом или весом до 200 м. Важно заметить, что интерфейс DS2480B имеет изменяемые временные параметры, что также может использоваться для улучшения рабочих характеристик и повышения надёжности работы сети 1-Wire. Оптимальная установка этих временных параметров производится с помощью определенных программ (таких как TMEX). Корректные временные параметры во многом определяют надежность работы сети. (См. Приложение Е).
Усовершенствованный интерфейс шины — это специально разработанная схема для использования в больших и малых сетях 1-Wire. Она специально предназначена для надежной работы при подключении сети с большими значениями веса и радиуса, вплоть до 500 м. (См. приложение С).
ЧТО ДЕЛАЕТ РАБОТУ СЕТИ 1-WIRE НАДЕЖНОЙ?
Когда происходит сбой в работе сети 1-Wire, то при выполнении алгоритма поиска неисправность часто выявляется в виде таинственной «пропажи» устройства. Приборы, которые физически присутствуют, могут то появляться, то исчезать при поиске. Иногда на результат процедуры поиска существенно влияет кажущееся незначительным изменение в работе сети или приборов. Почему же такое случается?
Среди всех прочих процессов, происходящих на шине 1-Wire, поиск прибора является наиболее сложной и трудной для выполнения процедурой. Только во время поиска один или более ведомых приборов могут выдавать НИЗКИЙ уровень на шину в одно и то же время (за исключением импульсов присутствия). Это означает, что состояние шины во время процесса поиска значительно отличается от её состояния в обычном режиме обмена сигналами с одним выбранным ведомым прибором. Если какой-либо из ведомых приборов пропустит фронт или не сможет распознать импульс, то он выйдет из синхронизации с алгоритмом поиска, что повлечет за собой ошибки в последовательности битов при поиске. Это означает, что проблема работы сети, которая привела к появлению выброса на нарастающем фронте сигнала, или к тому, что сигнал не достигает необходимого НИЗКОГО уровня или же происходит нехватка мощности у любого ведомого во время процесса поиска, будет причиной провала процесса поиска. Большинство алгоритмов поиска справляются со сбоем этой процедуры путем прерывания работы алгоритма и запуском его заново, так, чтобы еще необнаруженные устройства не выпадали из процесса. Несмотря на то, что сбой происходит в одном бите одного ведомого прибора, это может повлиять на любое число ведомых.
Алгоритмы поиска, как правило, учитывают, что устройства могут быть пропущены из-за помех. Возможно также, что в сетях, где имеются контактные iButton, подсоединение новых устройств iButton к сети может вызывать кратковременное КЗ (короткое замыкание) и неминуемую передачу импульса присутствия от вновь присоединенных приборов. Если временные соотношения этих событий складываются неудачно, то будут создаваться помехи в процессе поиска. Эти алгоритмы предусматривают решение данных проблем путем удаления ведомых из списка обнаруженных приборов только после того, как приборы не будут подавать сигналы присутствия в течение времени, называемого «противодребезговым» периодом.
Причины неудачного поиска могут быть различными. Среди наиболее часто встречающихся — нехватка паразитного питания (сети с большими радиусами, тяжелые сети), отражения на фронтах сигнала (сети с малым или средним радиусом, легкие сети), а также ложное срабатывание схем динамической подтяжки в интерфейсах на базе DS2408B вследствие затухающего переходного процесса на падающем фронте сигнала.
Часто кажется, что сбои в процедуре поиска сильно зависят от незначительных изменений в сети, ведомых приборах, или «фаз луны». Это происходит потому, что рассматриваемая сеть находится в пограничном состоянии, и очень небольшие изменения могут стать причиной удачного или неудачного поиска. Другими словами, сеть, которая кажется удачной, поскольку все приборы найдены в процессе поиска, может на самом деле быть на самом краю провала. Любое незначительное ухудшение может внезапно привести к ситуации, когда создается впечатление полного отказа (надо помнить, что поиск может остановиться, а приборы исчезнуть в результате одного дефектного бита). Вот почему пользователю необходимо строго придерживаться спецификаций и руководства, чтобы обеспечить надежную работу сети с хорошим запасом и устойчивостью к изменениям в кабеле, приборах и соединениях.
Сеть, в которой надежно осуществляется поиск, может в принципе надежно выполнять любую другую функцию 1-Wire.
НЕКОРРЕКТНЫЕ ВРЕМЕННЫЕ СООТНОШЕНИЯ В СЕТИ 1-WIRE
Когда программное обеспечение (встроенные программы) используется для генерации сигналов 1- Wire (иногда называемого «bit-banging» сигнала), легко сделать ошибки, которые не проявляются сразу. Наиболее распространенная ошибка при программировании мастера 1-Wire — это слишком поздняя (уже после прохождения фронта временного интервала) выборка данных из ведомых приборов. Ведомые приборы могут значительно различаться по своим временным параметрам в зависимости от изменений температуры и напряжения. Изменения могут также происходить от партии к партии вследствие изменений параметров технологического процесса. Схема, в которой сигнал представляет собой выборку в 30 мкс, может иметь полный успех в лабораторных условиях и даже поступить в производство, при этом будут выпущены приборы с недопустимыми временными параметрами. Позже, когда изменятся условия или сменится партия, и у ведомых произойдет сдвиг времени выборки от 32 мкс к 29 мкс, интерфейс мастера перестанет работать. Очень важно, чтобы параметры сигнала были сверены со спецификациями, даже если функционирование системы кажется идеальным в лабораторных условиях.
Последующее руководство по применению будет включать в себя контрольный перечень, с которым сможет сверяться разработчик мастеров, чтобы быть уверенным, что они соответствуют всем требуемым техническим характеристикам.
ЗАКЛЮЧЕНИЕ
Для обеспечения надежной работы электронные системы поддержки, как и любой электронный компонент, должны соответствовать спецификациям при всех условиях использования. При применении элементов iButton и реализации сетей и систем 1-Wire необходимо проявлять особую тщательность для того, чтобы между устройствами всегда была обеспечена надежная связь.
ПРИЛОЖЕНИЕ А. ТИПОВОЙ ИНТЕРФЕЙС ВЫВОДА ПОРТА ЦПУ (CPU)
ПРИЛОЖЕНИЕ В. УСОВЕРШЕНСТВОВАННЫЙ ШИННЫЙ ИНТЕРФЕЙС ЦПУ (CPU)
ПРИЛОЖЕНИЕ C. УСОВЕРШЕНСТВОВАННЫЙ ДРАЙВЕР СЕТИ 1-WIRE
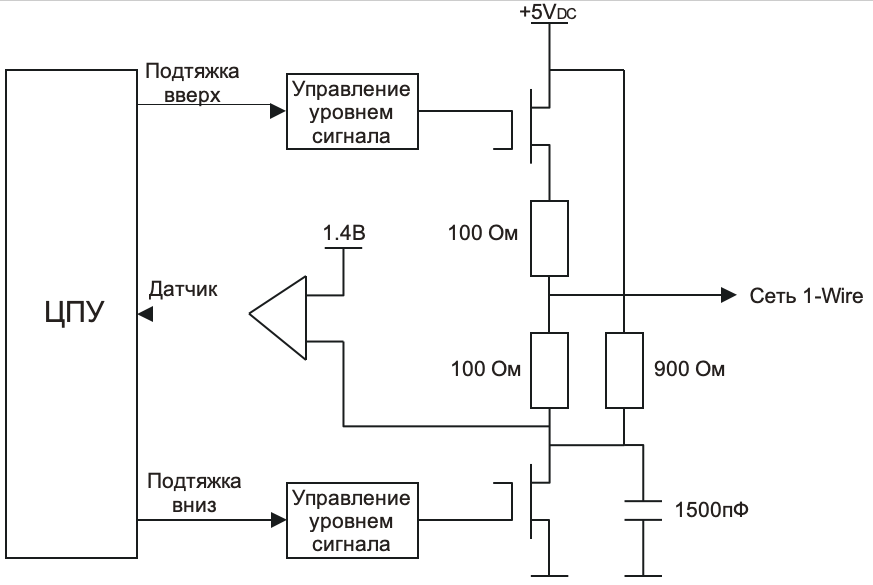
В данной схеме интерфейса мастера используется «интеллектуальная» (программно управляемая) мощная схема подтяжки для того, чтобы обеспечить надежную работу сетей, от имеющих очень небольшой вес до очень тяжелых, достигающих 500 м. Тщательное согласование импеданса (как верхнего, так и нижнего драйверов) также увеличивают допустимый предел для радиуса сети до 500 м. Схема подтяжки (верхний ключ) включается, когда, согласно протоколу 1-Wire, шина должна иметь ВЫСОКИЙ уровень, и во время считываний, после того как из шины была взята выборка и определено, что она находится на ВЫСОКОМ уровне. (Здесь не показана мощная схема подтяжки для питания элементов Java iButton, сильноточных датчиков и программируемых приборов с EPROM. С более подробной информацией о схеме усовершенствованного интерфейса можно ознакомится в последующих руководствах).
ПРИЛОЖЕНИЕ D. ДОПОЛНИТЕЛЬНЫЙ RC-ФИЛЬТР ДЛЯ ИНТЕРФЕЙСОВ DS2480B,
ПРИМЕНЯЕМЫХ В КОРОТКИХ И СРЕДНИХ СЕТЯХ
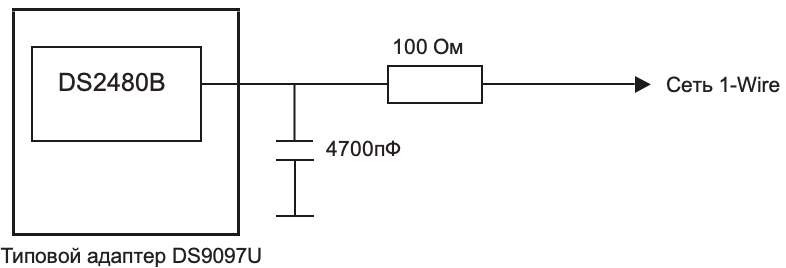
Этот простой RC-фильтр улучшает работу DS2480B на линиях короткой и средней длины с весом до 200 м. Данный фильтр необходим при использовании интерфейса мастера на базе DS2480 в цепях длиной от 1 до 100 м.
ПРИЛОЖЕНИЕ Е. ОПТИМИЗИРОВАННЫЕ ВРЕМЕННЫЕ ПАРАМЕТРЫ DS2480B
Преобразователь последовательной шины в шину 1–Wire DS2480B (используемый в сериях DS9097U адаптеров интерфейса PC) имеет временные соотношения 1-Wire, по умолчанию оптимизированные для малых сетей. Такие параметры не всегда могут обеспечить хорошую работу средних и больших сетей.
Установки временных параметров и скорости нарастания напряжения в DS2480B могут регулироваться с помощью программного обеспечения. И действительно, операционная система ТМЕХ осуществляет некоторые регулировки этих параметров на практике при использовании с данным интерфейсом. Программистам следует знать, что для надежной работы интерфейсы DS2480B всегда должны находится в «гибком» режиме (flex mode) и значения их временных параметров должны быть отрегулированы до оптимальных. (Более подробную информацию по установкам «гибкого» режима можно найти в спецификации DS2480B.)
Установки, которые могут регулироваться в DS2480B, включают в себя следующее:
Управление скоростью спада напряжения — скорость спада напряжения — это скорость, с которой напряжение на шине опускается с ВЫСОКОГО уровня на НИЗКИЙ. Слишком быстрое время спада (высокая скорость падения напряжения) вызывает переходный процесс в виде затухающих колебаний (звон) и генерацию сигналов в шине 1-Wire, которые не нужны и могут создавать помехи сигналам достоверных данных. Слишком медленное время нарастания и падения может не соответствовать требованиям к временным соотношениям и приводить к влиянию шума и отражений во время перехода из одного состояния в другое.
Продолжительность НИЗКОГО уровня сигнала «Запись единицы» — это длительность низкоуровневого импульса, с которого начинается каждый временной интервал. Если этот импульс слишком узкий, напряжение на конце длинной линии может никогда не достичь требуемого НИЗКОГО уровня до того, как закончится импульс.
Время смещения/восстановления выборки данных — этот параметр определяет, когда будет осуществляться выборка данных из ведомого прибора. Если этот параметр слишком мал, у линии может не хватить времени, чтобы подняться до заданного ВЫСОКОГО уровня до того, как произойдет выборка. Если это время слишком велико, то ведомые приборы, работающие поблизости от быстрого конца их диапазона, могут быть неправильно прочитаны. Этот параметр также определяет время между битами, в течение которого должна перезарядиться паразитная ёмкость в ведомых приборах.
Исследование линий с длинными и короткими шинами показало, что оптимальные временные параметры для всех сетей следующие:
Скорость спада напряжения 1.37 В/мкс
Продолжительность НИЗКОГО уровня сигнала «Запись единицы» 11 мкс Время смещения/восстановления выборкиданных 10 мкс
Эти временные параметры обеспечивают время самой последней возможной выборки (21 мкс, см. примечание ниже) и наибольшее возможное время восстановления (10 мкс), а также хорошо управляемую скорость нарастания напряжения.
Примечание. Эти временные соотношения применяются только к сетям, где напряжение подтяжки находится в диапазоне от 4.5 до 5.5 В.
СПЕЦИФИКАЦИЯ ВРЕМЕННЫХ ПАРАМЕТРОВ 1-WIRE И ВРЕМЯ ВЫБОРКИ
Спецификация временных параметров для устройств 1-Wire предусматривает, что время выборки (точка, в которой данные от ведомых устройств считываются мастером) составляет от 1 до 15 мкс, считая от начала временного интервала. Оптимальное время выборки 15 мкс. Это обеспечивает максимально возможное время для стартового импульса временного интервала и затем для времени нарастания напряжения в кабеле, не нарушая, однако, условий наихудшего случая для самого быстрого ведомого прибора, который может закончить нулевой бит за 15 мкс.
В сетях, поддерживающих вес кабеля и ведомых приборов, эти 15 мкс быстро становятся ограничивающим фактором. Однако, из-за того, что сети 1-Wire почти всегда управляются мастерами, которые обеспечивают напряжение подтяжки 5 В, мы можем сузить спецификацию и изменить время выборки под наши условия. К факторам, влияющим на скорость работы ведомых приборов в сети 1- Wire, относятся рабочее напряжение и температура. Определенный в спецификации рабочий диапазон для ведомых приборов 1-Wire предусматривает величину напряжения подтяжки от 2.8 до 6 В и температуру от –40 до +85°С. При таких условиях работы временная база ведомого прибора может варьироваться в пределах 15…60 мкс.
Когда мы ограничиваем напряжение подтяжки диапазоном 4.5…5.5 В, мы также сужаем изменение временной базы в ведомом приборе до интервала 22…60 мкс. Это позволяет увеличить время выборки до 21 мкс, что в свою очередь обеспечивает поддержку большего веса в сети (потому что это дает дополнительно 6 мкс, чтобы подтянуть линию до нужного ВЫСОКОГО уровня, когда ведомый прибор передает единицы).
Сопутствующие Товары
")
Адаптер USB-1-WIRE RS-000 (DS9490R)
Оригинальный товар Адаптера USB-1-WIRE (DS9490R) - служит основным (ведущим) элементом для создания микросети 1-wire необходим связи компьютера и датчиков 1-wire подключается в USB ..
2800.00 р.

Адаптер Ethernet-1-wire RS-001
Адаптер Ethernet - 1-wire - служит основным (ведущим) элементом для создания микросети 1-wire, необходим связи компьютера и датчиков 1-wire, позволяет построить микросеть 1-wire используя сеть Ethe..
4400.00 р.